 Sign in
Sign in
Collect the parts
In this lecture you will learn the names of the sensors, the actuators and robot building blocks found in your Lego Mindstorms robot building set. You will learn what each sensor can measure and how you can connect them together. The most important part of the Lego Mindstorms robot kit is the Brick. You will also learn about the sensors built into the brick, such as the LCD display, the buttons and the speaker.
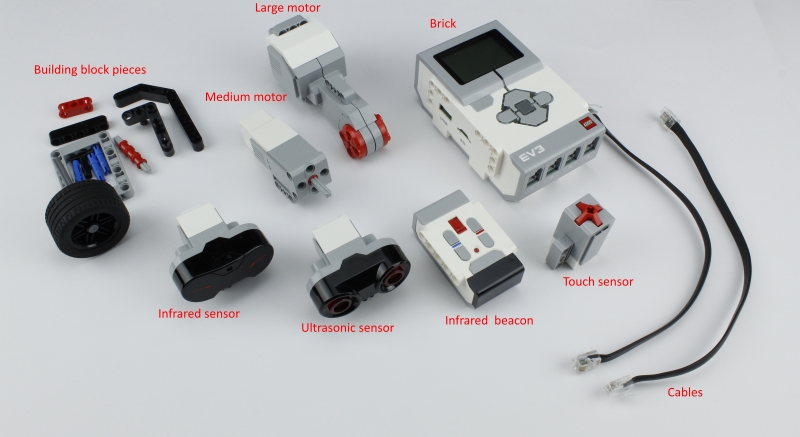
Figure 1 - Brick, motors, sensors, cables and building block pieces
Requirements
- Lego EV3 Brick
- Large and medium motors
- Sensors
- Wires
- Building block pieces
Describe what the actuator means!
Actuator - Anything that moves or takes action on your request. Example: motors, linear actuators used in cranes and electromagnet relays to operate switches.
Write down what the sensors are!
Sensor - Anything that detects a change in the enviroment. Example: touch sensor, color sensor, ultrasonic sensor, gyroscope or infrared sensor.
Take the Brick in your hand and tell what you know about it!
It is the control unit of a Lego Mindstorms robot. The EV3 Brick (Figure 2) connects to PC via Bluetooth, which is used for Ozeki 10 to control the Brick with all of it's motors and sensors. The Brick's LCD can visualize texts and display emoticons too. The Brick also has an integrated speaker, which can play mono tones. It has a multiple color Status Light and the LED color can be selected with Ozeki 10. There are A, B, C and D ports above the Brick's LCD screen. You should connect the motors to these ports, because these ports can supply higher power. The rest of the ports are numbered sensor ports from 1 to 4. They are on the bottom of the Brick. The sensors consume less energy than a motor from the Brick's 6 AA battery source, which can power the Brick alone for days.

Figure 2 - Lego Mindstorms EV3 Brick
Find the Touch sensor and speak about it! What can it detect?
With this sensor your robot will have touch detection (Figure 3). You should connect the sensor to the bottom of the EV3 Brick and you can use it through Ozeki 10. The sensor can recognize when it is being pressed or released. You can do a lot of things with the sensor. For example, you can build a robot claw that closes when something touches it or create a cookie clicker game that can count how many times the sensor has been pressed or you can control your robot by pressing the button.
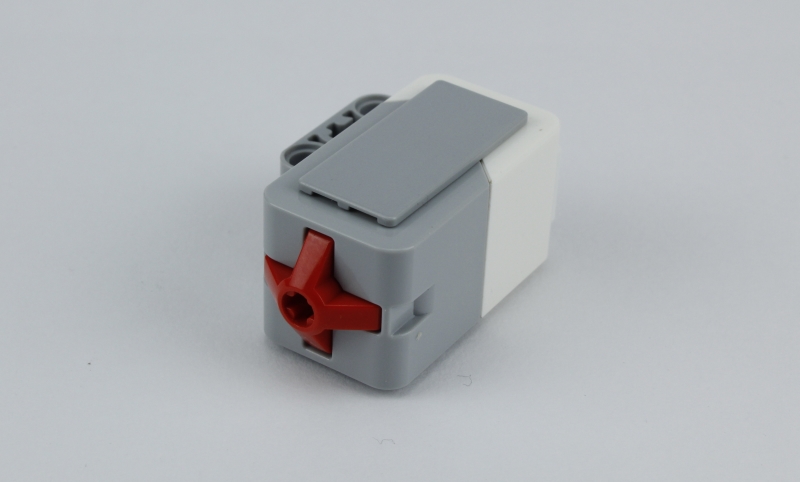
Figure 3 - Touch sensor
Look at the Color sensor and tell what you know about it!
With this sensor (Figure 4) you can detect colors or light intensity. Connect this sensor to one of the ports found bottom of Brick. The Color sensor can use three different modes: color, reflected light intensity and ambient light intensity. In color mode the sensor can differentiate up to seven different colors: black, blue, green, yellow, red, white and brown. In reflected light intensity mode, the sensor emits a red light and detects the intensity of the reflected light. The sensor can measure ambient light too coming from the environment. Test the sensor by driving it across differently colored papers.

Figure 4 - Color sensor
Find the Ultrasonic sensor describe it. What can it measure?
Using Ultrasonic sensor (Figure 5) you can measure linear distance between the sensor and object upto a maximum of 255 cm away. Please plug the Ultrasonic sensor to the bottom of the Brick. You can program the robot to move around a room and avoid objects, although you can use it in 'listen only' mode as well. No distance is measured in listen mode, just a true or false response is received if waves from another ultrasonic sensor is received, which can be on a fix location or on another robot. Either way the ultrasonic sensor is the best way to measure distance from walls or table legs.
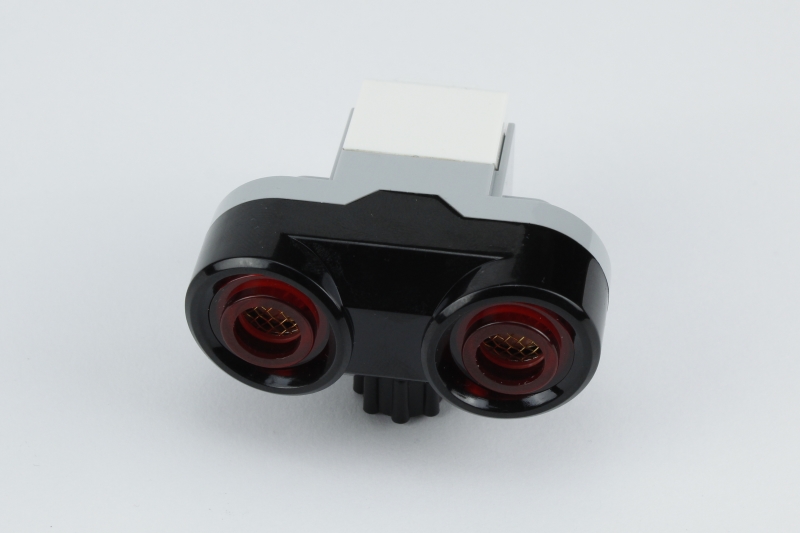
Figure 5 - Ultrasonic sensor
Recognise the Gyroscope sensor, take it in your hands and say something about it. What is it good for?
With the Gyroscope sensor (Figure 6) you can detect rotational motion in the plane which is indicated by the arrows on the top of the sensor housing. It can measure rotation rate in degrees per second or you can detect the actual angle it is facing. You should connect all sensors below the Brick's LCD and use them with Ozeki 10. For example program a robot to turn to a specified angle and display the angle if it is asked. Additionally you can program a robot that detects if it has fallen over or create a balancing robot that tries not to fall over. Your imagination is the limit.
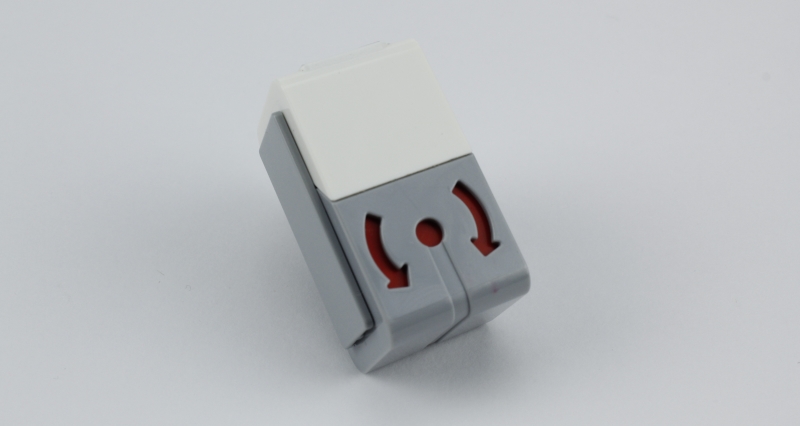
Figure 6 - Gyroscope sensor
Grab the Infrared sensor and beacon in your hands and tell a few words about them. What do you know about its functionality?
Infrared sensors measure distance or detect signals that are sent from the Infrared Beacon. The beacon transmits infrared signal waves. It can be set to standard beacon or remote mode. Connect the Infrared sensor to the bottom of the Brick for Ozeki 10 to detect it. The sensor has three different modes: proximity, beacon and remote. In proximity mode distance is measured from 0 to 100. In beacon mode the sensor can detect where to find the beacon from -25 to 25. Negative values are left, positive values are right. In remote mode the sensor can detect which beacon button is pressed.
The Infrared beacon has two different modes: beacon and remote. In beacon mode the Infrared Beacon continuously transmits an infrared signal, while in remote mode it only transmits a signal if a button on the top of it is pressed. The wide grey button on the Infrared Beacon can navigate between these two modes. In remote mode the sensor must be set to remote mode as well.

Figure 7 - Infrared beacon and infrared sensor
Find the motors in the kit and speak about them!
The Large motor and the Medium motor (Figure 8) has got internal rotation sensors. The rotation sensor can measure how much a motor has turned. You should connect the motors above the Brick's LCD screen to one of the A, B, C or D ports to power them through the Brick and control them through Ozeki 10. Use the motors to create a combination lock, a trundle wheel or a tank-style remote control for another robot. The difference between the Large and Medium motor is simple: the Large motor can move heavier loads. It is slower, but twice as strong as the Medium motor.

Figure 8 - Large and Medium motors
More information
- Collect the parts
- Build the frame
- Connect the motors to Lego Brick
- Connect the Lego Brick to your Windows PC
- Install Ozeki Robot Developer
- Connect the Lego robot to Ozeki 10
- Test the Lego Motors individually
- Start SNAP and write your first program
- Use Lego blocks in SNAP to control Lego Motors
- Drive your Robot around obstacles