 Sign in
Sign in
Courses
|
Course 1 - Build your first robotLearn to build a Lego robot! Start from the basics and go all the way to creating a PC controlled robot that can drive around an obstacle course with fun and ease. This course is the starting point of our education. It provides the basic knowledge to start to work with robots. Start |
|
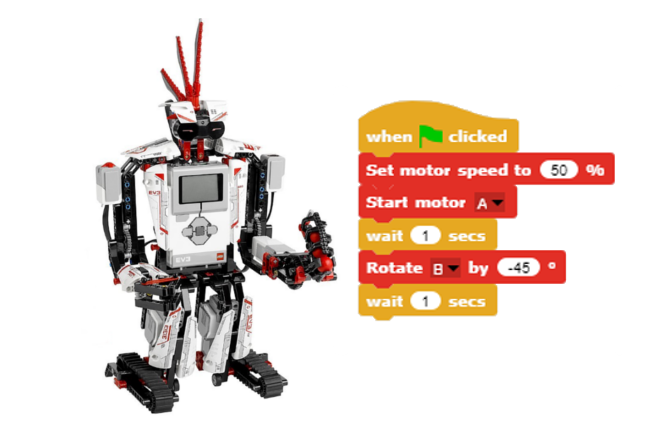
Course 2 - Robot programming basicsWrite code to control your Lego robot! You will learn how to communicate with your robot, and how to write programs using an easy to use programming language called SNAP. In this lecture you will write simple, easy to understand program. Don't worry if you have never written a program before. This is a good place to start. Start |

|
Course 3 - Introduction to sensorsLearn what a sensor is and how actuators operate. Find out what each sensor can measure and how you can use these sensors in your program code. This course contains a detailed description of each sensor and motor in your Lego robot kit. In order to build robots it is essential to known how these devices can be used, what they can measure and how you can work with them in your robot control apps. Start |

|
Course 4 - Robot control
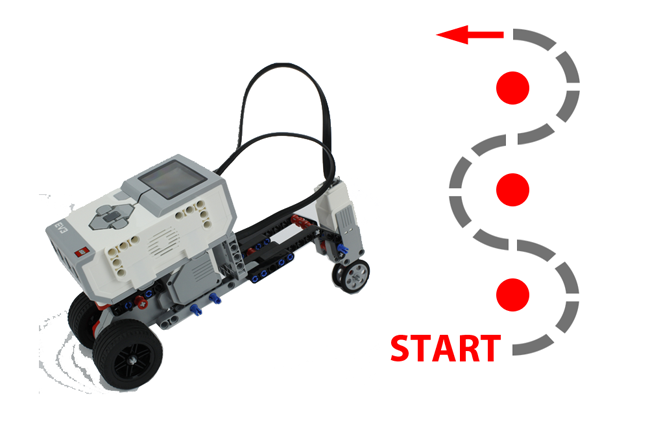
Learn to control your robot! Start by driving it from your keyboard or gamepad, and go all the way to creating a PC controlled robot that can follow a series of steps written in code. In this lecture you will learn about working with sensor inputs, you will see how a motor can be used as a rotary encoder, and you will also learn about sensor calibration. Start |
|
Course 5 - Robot communication
Learn about speech recognition and voice control. See how a robot can interact with the world using SMS, E-mail, voice calls and other means of communication. These communication channels can be used for controlling the robot remotely, or they can be used to send alerts and notifications to human operators. Start |

|
Course 6 - Robot motion planning
Learn how to calculate time, distance and speed, so you can predict the movement of your robots. You can also see how to connect gears to make a robot more powerful or faster. This lecture is essential if you wish to move robots around. It teaches the most important terms and definitions used in robot motion planning. Start |

|
Course 7 - Robot navigation
Learn about robot navigation. Learn what a lidar is, find out how a parking assist system works using ultrasonic distance sensors and how a robot vacuum can dock using an IR Beacon. This lecture also shows you how you can create a lunch bag carrying robot, that can follow the child to school at a distance. Start |
|
|
Course 8 - Robot vision
This course gives you knowledge about how to use cameras and visual sensors to coordinate robot motion. It shows you how to turn an USB camera into an amazing vision system. You will learn about line and circle detection, vision based motion coordination and you will see how you can manage jobs using QR code detection. Start |

|
Course 9 - Data acquisition for robots
Collecting data and using the data to make decisions is an essential part of robotics. In this course you will learn how to gather sensor data into a database and how to use it. You will learn about SQL, you will learn how to create database tables, and how to put and read data from tables. You will also learn to save data into text files and Excel spread sheets. Start |

|
Course 10 - Become a Robot Master
The goal of this course is to make you an expert robot programmer. You will learn how to program robotos using C#.Net. You will use Microsoft Visual studio to create your own Ozeki 10 app. You will learn about communicating with sensors and motors directrly, and you will learn how to troubleshoot problems and build fault tolerant robot systems. Start |